




Budujemy samochodzik.
Sterowany samochodzik można by zrobić w bardzo prosty sposób przykręcając kółka bezpośrednio do osi silnika a ten do podwozia przeszłego pojazdu. Ja postanowiłem trochę skomplikować sobie życie i zastosować przekładnię na kółkach i paskach zębatych. Zawsze lubiłem obserwować takie przekładnie w skomplikowanych układach np. kserokopiarkach więc postanowiłem zrobić swój pierwszy.
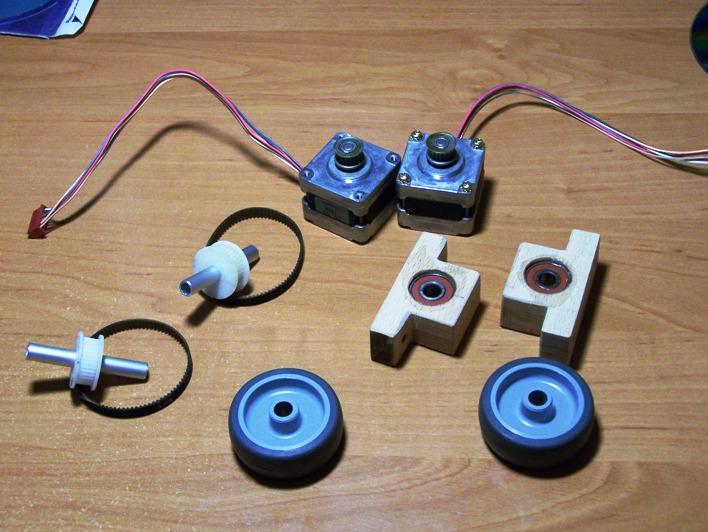
Na zdjęciu widać dwa kółka napędowe zakupione w sklepie OBI, dwie aluminiowe osie z już założonymi kółkami zębatymi do przeniesienia napędu, dwa silniki krokowe, paski oraz drewniane łapy z łożyskami.
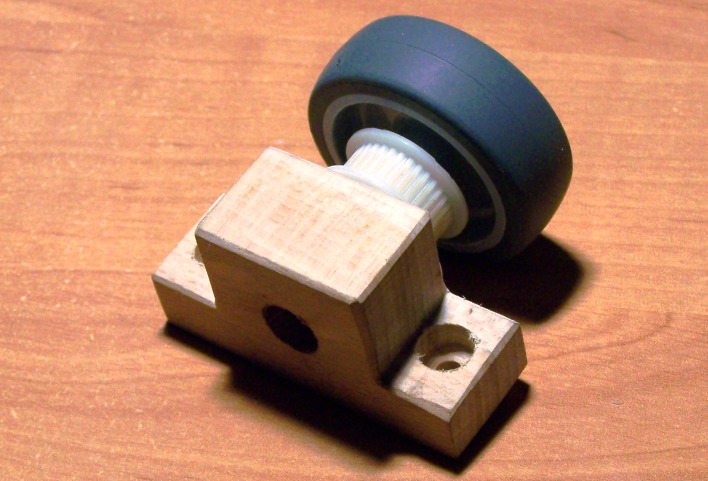
W wystruganą z kawałka deski łapę wcisnąłem łożysko a w nie wałek z kółkiem zębatym i napędowym. Taki zespół napędowy przykręcę do podwozia pojazdu i za pomocą paska zębatego przeniosę napęd z silnika.
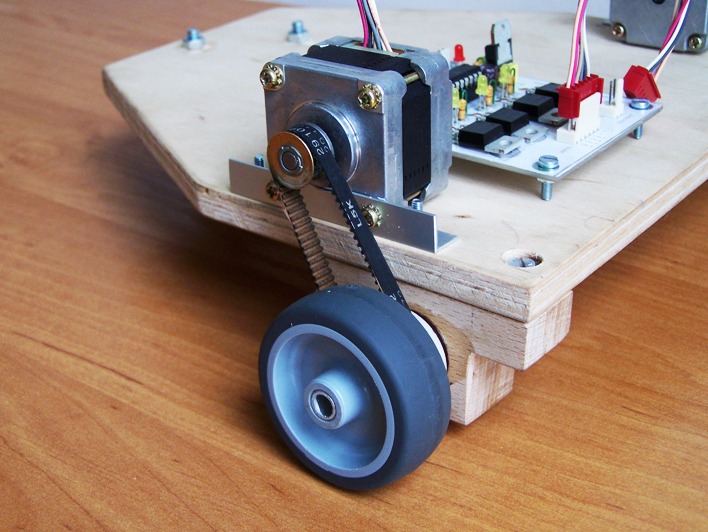
I mamy gotowy napęd jednej strony pojazdu. Silnik krokowy zamontowałem na małym kątowniku aluminiowym również ze sklepu OBI, trzeba w nim z jednej strony poszerzyć otwory tak by możliwa była regulacja naciągu paska.
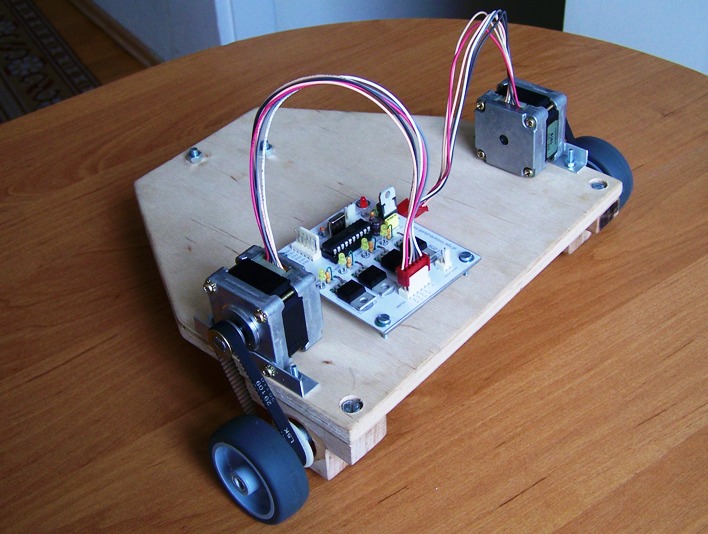
I to samo po drugiej stronie. Sterowanie pojazdem będzie polegało na zmianie parametrów pracy silników i jeśli np. oba będą obracać się z tą samą prędkością w tym samym kierunku pojazd będzie jechał na wprost. Jeśli np. oba będą obracać się w przeciwnych kierunkach pojazd będzie obracał się.
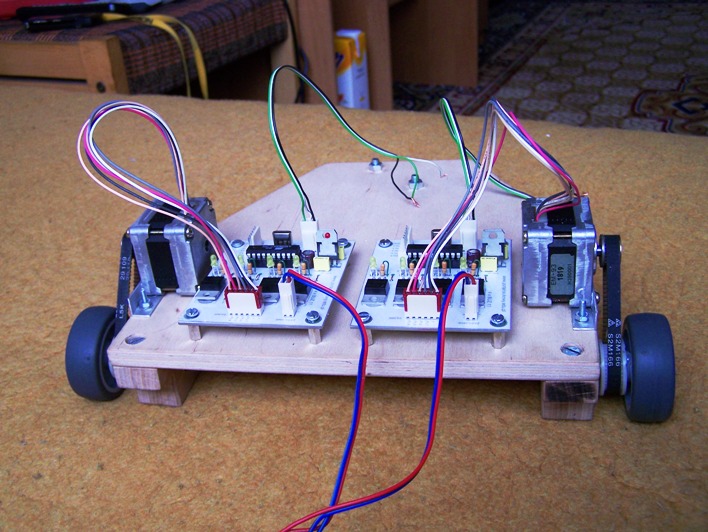
I wreszcie na zdjęciu powyżej zmontowany samochodzik gotowy do pracy. Już można podłączyć baterię i ustawiając stany niskie na pinach sterowników kierować nim - efekt jest naprawdę niesamowity :), niedługo zamieszczę filmik. W tym miejscu zakończę część pierwszą projektu, w części drugiej zamontuję akumulator, czujniki optyczne albo ultradźwiękowe oraz sterownik, który interpretując sygnały z czujników będzie sterował pojazdem.
Nagrałem pierwszy film z testu układu napędowego, na razie zmieniam stany na wejściach sterowników zwykłymi przełącznikami dwustanowymi. Nie łatwo jest tak kierować więc proszę się nie śmiać.










