Tematem magnetycznej lewitacji zainteresowałem sie po przeczytaniu jednego z numerów miesięcznika dla początkujących elektroników "Elektronika dla Wszystkich". Na łamach tego pisma opisane zostały dwa projekty takich urządzeń, jednak projekt wykonany przeze mnie pochodzi z Internetu i trochę się od zaprezentowanych w "EdW" różni. Ale od początku:
Czym właściwie jest lewitacja magnetyczna ?
Zjawisko lewitacji magnetycznej polega na unoszeniu się metalowego przedmiotu w przestrzeni. Unosi się on dzięki działaniu na niego niewidzialnej dla oka siły wywołanej przez pole elektromagnetyczne. Unoszący się przedmiot nie jest zatem związany mechanicznie z innym układem i stwarza niesamowite wrażenie u obserwatora. Obserwowany lewitujący przedmiot przeczy naszej intuicji i sprawia fenomenalne wręcz uczucie, że cos jest nie tak.
Jak coś takiego w ogóle może działać?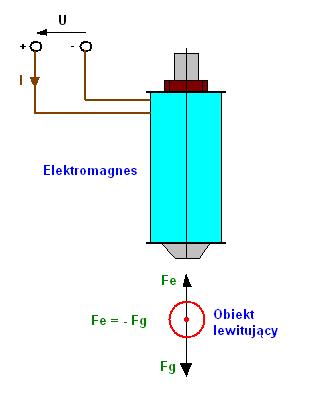 Rysunek po lewej stronie przedstawia elektromagnes oraz umieszczony pod nim obiekt wykonany z metalu. Będą działały na niego dwie siły: pierwsza to siła wytworzona przez grawitację ziemi, druga pochodzi z pola magnetycznego wytworzonego przez elektromagnes. Obie te siły będą do siebie skierowane przeciwnie. Teoretycznie wystarczyło by poprzez regulacje prądu płynącego przez elektromagnes wytworzyć stałe pole magnetyczne, które wytwarzało by siłę równą tej pochodzącej z grawitacji. W przestrzeni istniał by punkt, w którym metalowy obiekt lewitował by w powietrzu. W praktyce jest to jednak nie możliwe, gdyż nawet minimalne zakłócenie tego stanu powodowało by upadek przedmiotu bądź jego przyciągnięcie przez elektromagnes. Potrzebny jest zatem element, który w czasie rzeczywistym kontrolował by położenie przedmiotu w przestrzeni i na bieżąco regulował natężenie pola magnetycznego elektromagnesu. W projektach z "EdW" problem rozwiązano poprzez zastosowanie bariery optycznej - im obiekt bardziej zbliżył się do elektromagnesu przesłaniał promień lasera i powodował, że na fotoelement padało mniej światła i tym samym do elektromagnesu docierało mniej prądu, wytwarzana siła się zmniejszała i element oddalał się od elektromagnesu. W drugą stronę układ działał odwrotnie - im dalej tym płynęło więcej prądu. Po wyregulowaniu układu metalowy obiekt zaczynał lewitować w punkcie równowagi pomiędzy dwiema siłami.
Rysunek po lewej stronie przedstawia elektromagnes oraz umieszczony pod nim obiekt wykonany z metalu. Będą działały na niego dwie siły: pierwsza to siła wytworzona przez grawitację ziemi, druga pochodzi z pola magnetycznego wytworzonego przez elektromagnes. Obie te siły będą do siebie skierowane przeciwnie. Teoretycznie wystarczyło by poprzez regulacje prądu płynącego przez elektromagnes wytworzyć stałe pole magnetyczne, które wytwarzało by siłę równą tej pochodzącej z grawitacji. W przestrzeni istniał by punkt, w którym metalowy obiekt lewitował by w powietrzu. W praktyce jest to jednak nie możliwe, gdyż nawet minimalne zakłócenie tego stanu powodowało by upadek przedmiotu bądź jego przyciągnięcie przez elektromagnes. Potrzebny jest zatem element, który w czasie rzeczywistym kontrolował by położenie przedmiotu w przestrzeni i na bieżąco regulował natężenie pola magnetycznego elektromagnesu. W projektach z "EdW" problem rozwiązano poprzez zastosowanie bariery optycznej - im obiekt bardziej zbliżył się do elektromagnesu przesłaniał promień lasera i powodował, że na fotoelement padało mniej światła i tym samym do elektromagnesu docierało mniej prądu, wytwarzana siła się zmniejszała i element oddalał się od elektromagnesu. W drugą stronę układ działał odwrotnie - im dalej tym płynęło więcej prądu. Po wyregulowaniu układu metalowy obiekt zaczynał lewitować w punkcie równowagi pomiędzy dwiema siłami.
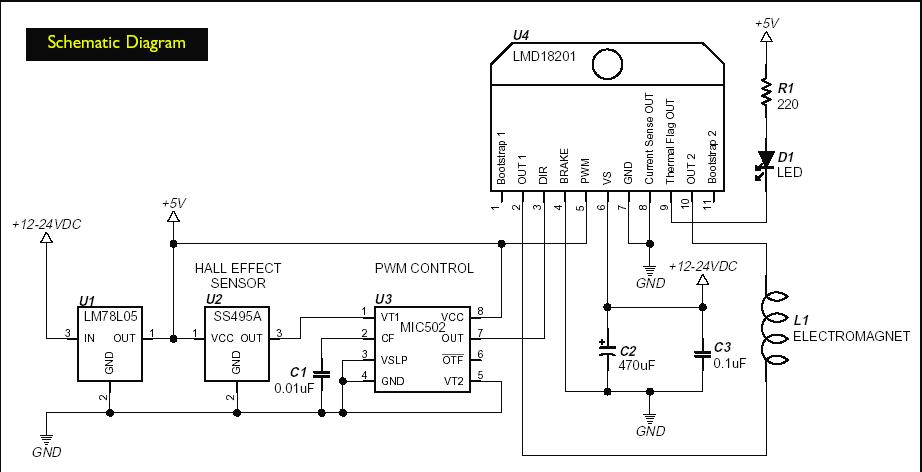 Projekt ten bardzo różni się od przedstawionych w "EdW". Po pierwsze czujnikiem położenia nie jest bariera optyczna tylko sensor hallotronowy, na którego wyjściu napięcie zwiększa się proporcjonalnie do natężenia pola magnetycznego w którym ten sensor się znajduje, po drugie - pole wytwarzane przez elektromagnes nie jest zmieniane regulacją płynącego prądu lecz elektromagnes zasilany jest przemiennym prądem o regulowanym wypełnieniu przebiegu. Małe wypełnienie przebiegu (szpilki) to mała wypadkowa moc czynna i tym samym słabe pole elektromagnetyczne, duże wypełnienie to w rezultacie prawie stałe silne pole. po trzecie - obiektem lewitującym musi być magnes stały, gdyż coś musi wytwarzać pole magnetyczne, którego natężenie będzie badał sensor, im magnes dalej tym natężenie mniejsze. Przedstawiony powyżej schemat składa się z trzech zasadniczych części: pierwsza to czujnik położenia, druga modulator i trzecia to element wykonawczy.
Projekt ten bardzo różni się od przedstawionych w "EdW". Po pierwsze czujnikiem położenia nie jest bariera optyczna tylko sensor hallotronowy, na którego wyjściu napięcie zwiększa się proporcjonalnie do natężenia pola magnetycznego w którym ten sensor się znajduje, po drugie - pole wytwarzane przez elektromagnes nie jest zmieniane regulacją płynącego prądu lecz elektromagnes zasilany jest przemiennym prądem o regulowanym wypełnieniu przebiegu. Małe wypełnienie przebiegu (szpilki) to mała wypadkowa moc czynna i tym samym słabe pole elektromagnetyczne, duże wypełnienie to w rezultacie prawie stałe silne pole. po trzecie - obiektem lewitującym musi być magnes stały, gdyż coś musi wytwarzać pole magnetyczne, którego natężenie będzie badał sensor, im magnes dalej tym natężenie mniejsze. Przedstawiony powyżej schemat składa się z trzech zasadniczych części: pierwsza to czujnik położenia, druga modulator i trzecia to element wykonawczy.
A teraz projekt znaleziony w Internecie.
Modulator PWM MIC 502 BN - czyli modulator długości impulsu (Pulse Width Modulation)> Również trudnodostępny, ale do kupienia w Microdis za ok. 11 PLN. Wytwarza sygnał prostokątny o wypełnieniu proporcjonalnym do podanego na pin Nr 1 napięcia.  Czujnik hallotronowy SS 495 A - dość trudno dostępny w Polsce, można go jednak kupić w Firmie Microdis Elektronics za ok 12,50 PLN. Jest to czujnik natężenia pola magnetycznego wykorzystujący tzw. Zjawisko Halla - czyli powstanie różnicy potencjałów w półprzewodniku umieszczonym w polu magnetycznym przez który płynie prąd.
Czujnik hallotronowy SS 495 A - dość trudno dostępny w Polsce, można go jednak kupić w Firmie Microdis Elektronics za ok 12,50 PLN. Jest to czujnik natężenia pola magnetycznego wykorzystujący tzw. Zjawisko Halla - czyli powstanie różnicy potencjałów w półprzewodniku umieszczonym w polu magnetycznym przez który płynie prąd. 
 Serwosterownik LMD 18201 - 3A, 55V. Najdroższy element projektu. W Microdis kosztuje ok. 80 PLN, na warszawskim "Wolumenie" udało mi sie go kupić za 45 PLN. W naszym układzie spełnia rolę końcówki mocy, wytwarza przebieg identyczny jak na wyjściu modulatora PWM, tylko że o dużo większej mocy.
Serwosterownik LMD 18201 - 3A, 55V. Najdroższy element projektu. W Microdis kosztuje ok. 80 PLN, na warszawskim "Wolumenie" udało mi sie go kupić za 45 PLN. W naszym układzie spełnia rolę końcówki mocy, wytwarza przebieg identyczny jak na wyjściu modulatora PWM, tylko że o dużo większej mocy.











