




Tematem magnetycznej lewitacji zainteresowałem sie po przeczytaniu jednego z numerów miesięcznika dla początkujących elektroników "Elektronika dla Wszystkich". Na łamach tego pisma opisane zostały dwa projekty takich urządzeń, jednak projekt wykonany przeze mnie pochodzi z Internetu i trochę się od zaprezentowanych w "EdW" różni. Ale od początku:
Czym właściwie jest lewitacja magnetyczna ?
Zjawisko lewitacji magnetycznej polega na unoszeniu się metalowego przedmiotu w przestrzeni. Unosi się on dzięki działaniu na niego niewidzialnej dla oka siły wywołanej przez pole elektromagnetyczne. Unoszący się przedmiot nie jest zatem związany mechanicznie z innym układem i stwarza niesamowite wrażenie u obserwatora. Obserwowany lewitujący przedmiot przeczy naszej intuicji i sprawia fenomenalne wręcz uczucie, że cos jest nie tak.
Jak coś takiego w ogóle może działać?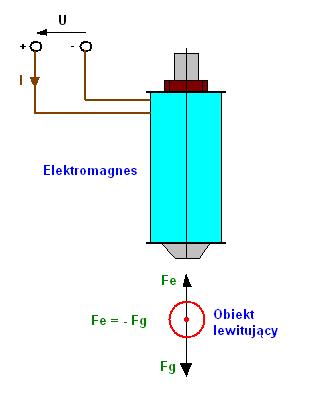 Rysunek po lewej stronie przedstawia elektromagnes oraz umieszczony pod nim obiekt wykonany z metalu. Będą działały na niego dwie siły: pierwsza to siła wytworzona przez grawitację ziemi, druga pochodzi z pola magnetycznego wytworzonego przez elektromagnes. Obie te siły będą do siebie skierowane przeciwnie. Teoretycznie wystarczyło by poprzez regulacje prądu płynącego przez elektromagnes wytworzyć stałe pole magnetyczne, które wytwarzało by siłę równą tej pochodzącej z grawitacji. W przestrzeni istniał by punkt, w którym metalowy obiekt lewitował by w powietrzu. W praktyce jest to jednak nie możliwe, gdyż nawet minimalne zakłócenie tego stanu powodowało by upadek przedmiotu bądź jego przyciągnięcie przez elektromagnes. Potrzebny jest zatem element, który w czasie rzeczywistym kontrolował by położenie przedmiotu w przestrzeni i na bieżąco regulował natężenie pola magnetycznego elektromagnesu. W projektach z "EdW" problem rozwiązano poprzez zastosowanie bariery optycznej - im obiekt bardziej zbliżył się do elektromagnesu przesłaniał promień lasera i powodował, że na fotoelement padało mniej światła i tym samym do elektromagnesu docierało mniej prądu, wytwarzana siła się zmniejszała i element oddalał się od elektromagnesu. W drugą stronę układ działał odwrotnie - im dalej tym płynęło więcej prądu. Po wyregulowaniu układu metalowy obiekt zaczynał lewitować w punkcie równowagi pomiędzy dwiema siłami.
Rysunek po lewej stronie przedstawia elektromagnes oraz umieszczony pod nim obiekt wykonany z metalu. Będą działały na niego dwie siły: pierwsza to siła wytworzona przez grawitację ziemi, druga pochodzi z pola magnetycznego wytworzonego przez elektromagnes. Obie te siły będą do siebie skierowane przeciwnie. Teoretycznie wystarczyło by poprzez regulacje prądu płynącego przez elektromagnes wytworzyć stałe pole magnetyczne, które wytwarzało by siłę równą tej pochodzącej z grawitacji. W przestrzeni istniał by punkt, w którym metalowy obiekt lewitował by w powietrzu. W praktyce jest to jednak nie możliwe, gdyż nawet minimalne zakłócenie tego stanu powodowało by upadek przedmiotu bądź jego przyciągnięcie przez elektromagnes. Potrzebny jest zatem element, który w czasie rzeczywistym kontrolował by położenie przedmiotu w przestrzeni i na bieżąco regulował natężenie pola magnetycznego elektromagnesu. W projektach z "EdW" problem rozwiązano poprzez zastosowanie bariery optycznej - im obiekt bardziej zbliżył się do elektromagnesu przesłaniał promień lasera i powodował, że na fotoelement padało mniej światła i tym samym do elektromagnesu docierało mniej prądu, wytwarzana siła się zmniejszała i element oddalał się od elektromagnesu. W drugą stronę układ działał odwrotnie - im dalej tym płynęło więcej prądu. Po wyregulowaniu układu metalowy obiekt zaczynał lewitować w punkcie równowagi pomiędzy dwiema siłami.
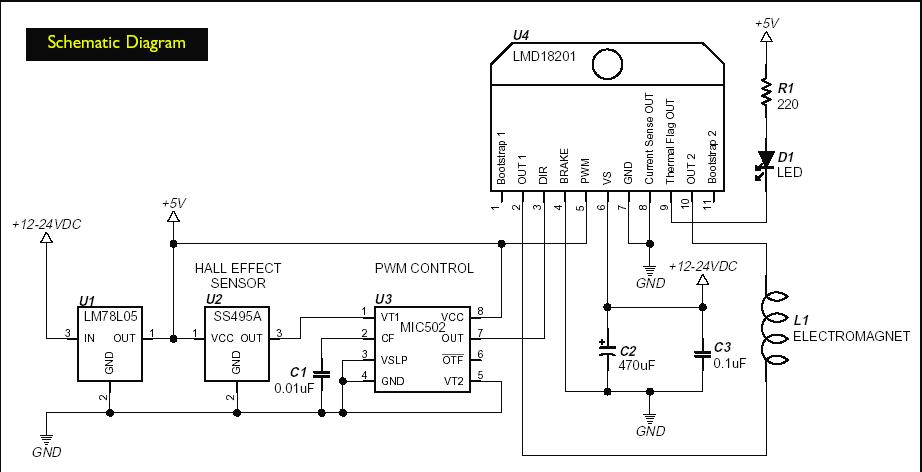 Projekt ten bardzo różni się od przedstawionych w "EdW". Po pierwsze czujnikiem położenia nie jest bariera optyczna tylko sensor hallotronowy, na którego wyjściu napięcie zwiększa się proporcjonalnie do natężenia pola magnetycznego w którym ten sensor się znajduje, po drugie - pole wytwarzane przez elektromagnes nie jest zmieniane regulacją płynącego prądu lecz elektromagnes zasilany jest przemiennym prądem o regulowanym wypełnieniu przebiegu. Małe wypełnienie przebiegu (szpilki) to mała wypadkowa moc czynna i tym samym słabe pole elektromagnetyczne, duże wypełnienie to w rezultacie prawie stałe silne pole. po trzecie - obiektem lewitującym musi być magnes stały, gdyż coś musi wytwarzać pole magnetyczne, którego natężenie będzie badał sensor, im magnes dalej tym natężenie mniejsze. Przedstawiony powyżej schemat składa się z trzech zasadniczych części: pierwsza to czujnik położenia, druga modulator i trzecia to element wykonawczy.
Projekt ten bardzo różni się od przedstawionych w "EdW". Po pierwsze czujnikiem położenia nie jest bariera optyczna tylko sensor hallotronowy, na którego wyjściu napięcie zwiększa się proporcjonalnie do natężenia pola magnetycznego w którym ten sensor się znajduje, po drugie - pole wytwarzane przez elektromagnes nie jest zmieniane regulacją płynącego prądu lecz elektromagnes zasilany jest przemiennym prądem o regulowanym wypełnieniu przebiegu. Małe wypełnienie przebiegu (szpilki) to mała wypadkowa moc czynna i tym samym słabe pole elektromagnetyczne, duże wypełnienie to w rezultacie prawie stałe silne pole. po trzecie - obiektem lewitującym musi być magnes stały, gdyż coś musi wytwarzać pole magnetyczne, którego natężenie będzie badał sensor, im magnes dalej tym natężenie mniejsze. Przedstawiony powyżej schemat składa się z trzech zasadniczych części: pierwsza to czujnik położenia, druga modulator i trzecia to element wykonawczy.
A teraz projekt znaleziony w Internecie.
Modulator PWM MIC 502 BN - czyli modulator długości impulsu (Pulse Width Modulation)> Również trudnodostępny, ale do kupienia w Microdis za ok. 11 PLN. Wytwarza sygnał prostokątny o wypełnieniu proporcjonalnym do podanego na pin Nr 1 napięcia. 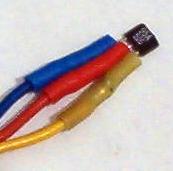 Czujnik hallotronowy SS 495 A - dość trudno dostępny w Polsce, można go jednak kupić w Firmie Microdis Elektronics za ok 12,50 PLN. Jest to czujnik natężenia pola magnetycznego wykorzystujący tzw. Zjawisko Halla - czyli powstanie różnicy potencjałów w półprzewodniku umieszczonym w polu magnetycznym przez który płynie prąd.
Czujnik hallotronowy SS 495 A - dość trudno dostępny w Polsce, można go jednak kupić w Firmie Microdis Elektronics za ok 12,50 PLN. Jest to czujnik natężenia pola magnetycznego wykorzystujący tzw. Zjawisko Halla - czyli powstanie różnicy potencjałów w półprzewodniku umieszczonym w polu magnetycznym przez który płynie prąd. 
 Serwosterownik LMD 18201 - 3A, 55V. Najdroższy element projektu. W Microdis kosztuje ok. 80 PLN, na warszawskim "Wolumenie" udało mi sie go kupić za 45 PLN. W naszym układzie spełnia rolę końcówki mocy, wytwarza przebieg identyczny jak na wyjściu modulatora PWM, tylko że o dużo większej mocy.
Serwosterownik LMD 18201 - 3A, 55V. Najdroższy element projektu. W Microdis kosztuje ok. 80 PLN, na warszawskim "Wolumenie" udało mi sie go kupić za 45 PLN. W naszym układzie spełnia rolę końcówki mocy, wytwarza przebieg identyczny jak na wyjściu modulatora PWM, tylko że o dużo większej mocy.
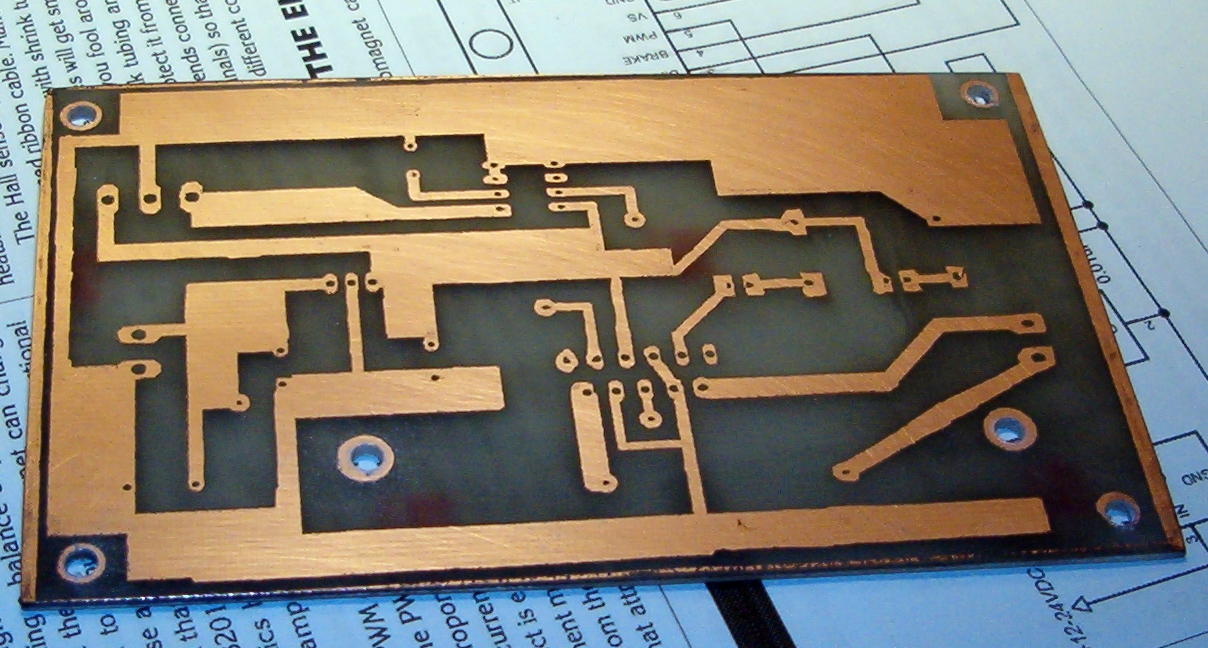
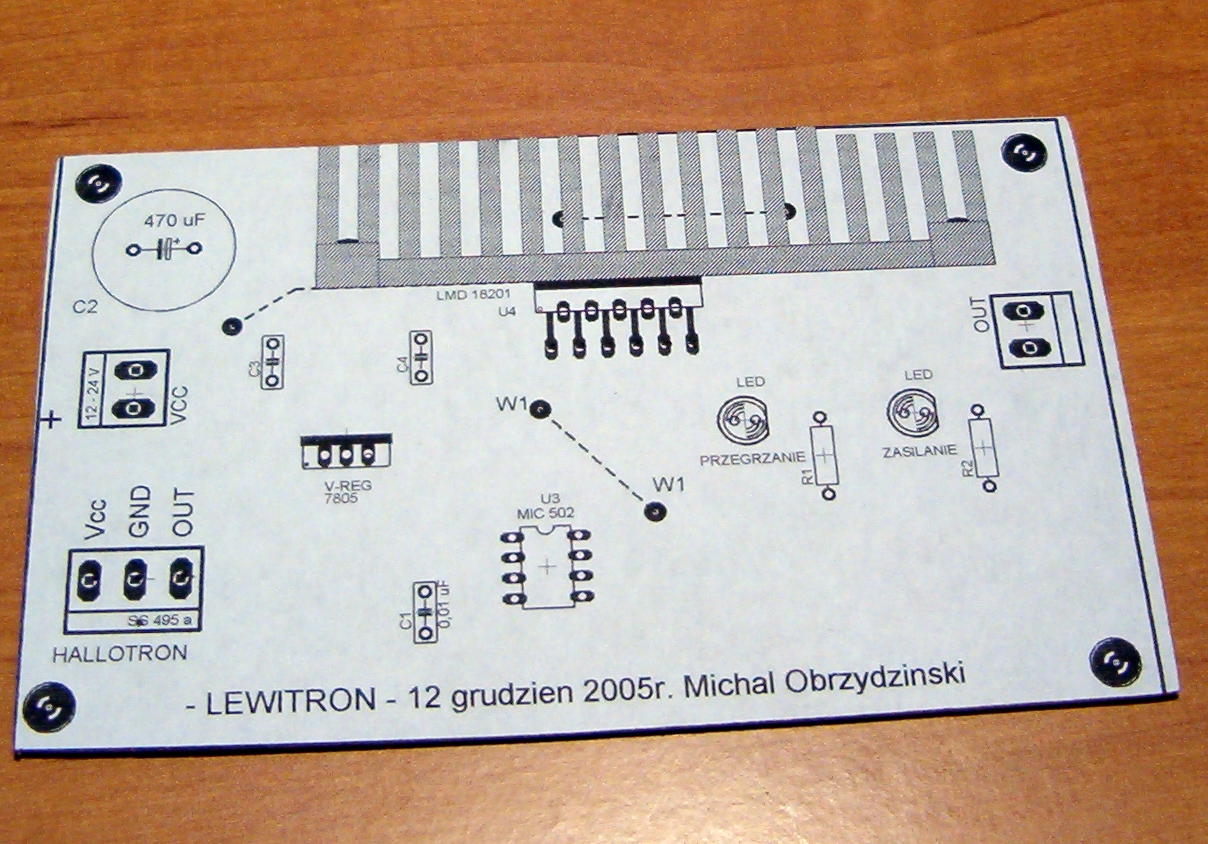
Pierwszą czynnością jaką musimy wykonać jest wykonanie obwodu drukowanego na płytce laminowanej. Projekt wykonałem w programie "Eagle"
A tak wyglada wytrawiona płytka z jednej i drugiej strony:
Kolejny etap to wykonanie elektromagnesu. Jego rezystancja dla zasilania równego 12 V nie powinna być mniejsza niż 8 omów. W przeciwnym razie ugotujemy LMD 18201. Można policzyć z odpowiednich wzorów ile potrzebne będzie drutu o odpowiednim przekroju dla danej rezystancji, bądź znaleźć jakąś cewkę o takiej własnie rezystancji i ją przewinąć. Ja wykorzystałem silnik od pompy wodnej starej pralki automatycznej. Jego cewka miała rezystancję 22,5 oma

 Teraz trochę prcyzyjnego lutowania. Czujnik hallotronowy jest bardzo mały i trzeba poświęcić trochę czasu by dolutować do niego przewody. Trzeba pamiętać o zachowaniu prawidłowego podłączenia - niebieski - + 5V, czerwony - GND, Żółty - wyjście.
Teraz trochę prcyzyjnego lutowania. Czujnik hallotronowy jest bardzo mały i trzeba poświęcić trochę czasu by dolutować do niego przewody. Trzeba pamiętać o zachowaniu prawidłowego podłączenia - niebieski - + 5V, czerwony - GND, Żółty - wyjście.
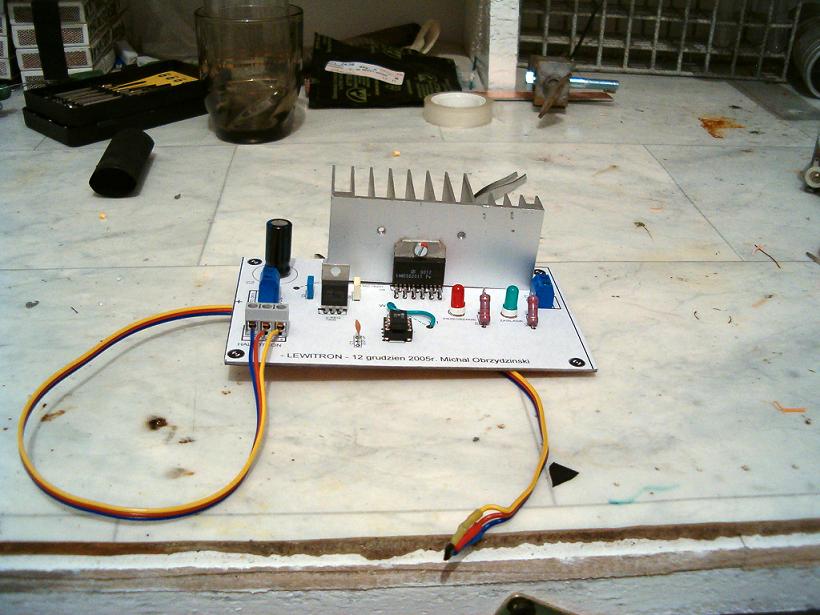
Płytka po wlutowaniu wszystkich elementów wyglada tak:
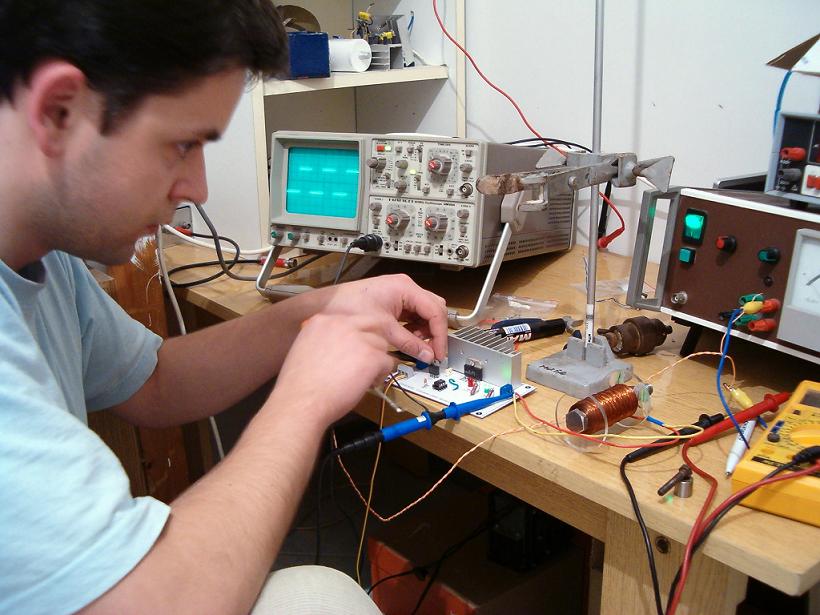
Na tej stronie zacznę od najbardziej nerwowej części pracy nad projektem. Sprawdzę, czy mój układ w ogóle działa. Na początek podpinam tylko czujnik hallotronowy i zasilanie, elektromagnes podłaczę gdy będzie wszystko OK, w przeciwnym razie takie obciążenie mogło by spalić bardzo drogi serwosterownik. 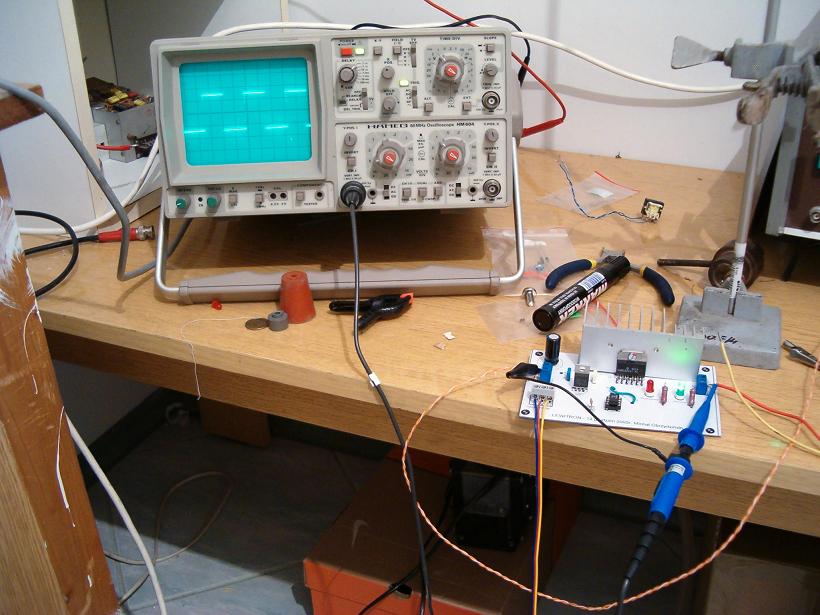 W miejsce elektromagnesu przyłączamy sondę oscyloskopu i zamykamy obwód zasilający. Układ odpalił za pierwszym razem bez żadnych poprawek. Naprawdę warto poświęcić więcej czasu na projektowanie i sprawdzenie wszystkich połączeń, gdy płytka jest jeszcze na ekranie monitora, późniejsze poprawki kosztują dużo więcej, zarówno czasu jak i pieniędzy.
W miejsce elektromagnesu przyłączamy sondę oscyloskopu i zamykamy obwód zasilający. Układ odpalił za pierwszym razem bez żadnych poprawek. Naprawdę warto poświęcić więcej czasu na projektowanie i sprawdzenie wszystkich połączeń, gdy płytka jest jeszcze na ekranie monitora, późniejsze poprawki kosztują dużo więcej, zarówno czasu jak i pieniędzy.
Poniżej przedstawiam oscylogramy z wyjścia na elektromagnes. Pierwszy to przebieg generowany gdy lewitujący magnes znajduje się blisko czujnika. W tym momencie lewitujący obiekt zaczął by się oddalać gdyż średnia moc czynna jest niewielka. Drugi przedstawia przebieg gdy obiekt już się oddalił, wypełnienie rośnie proporcjonalnie by "nie wypuścić" magnesu, siła przyciągania wzrasta.
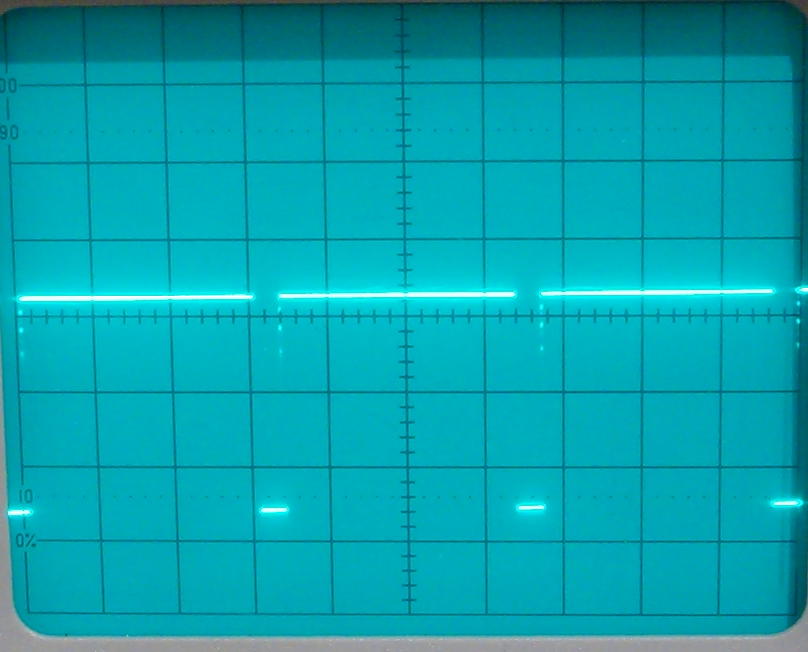
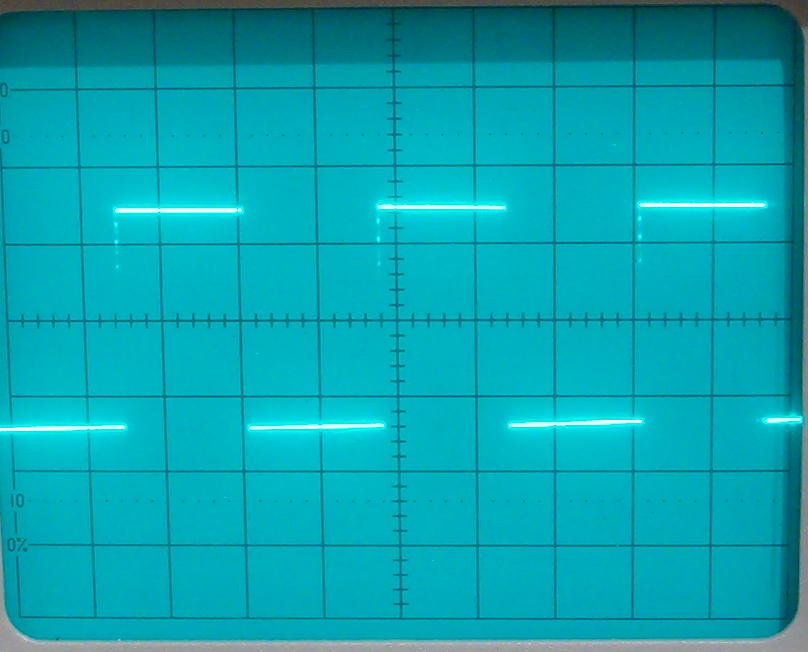
Częstotliwość generowanego sygnału to ok. 220 herców i można ja zmieniać pojemnością kondensatora C1.
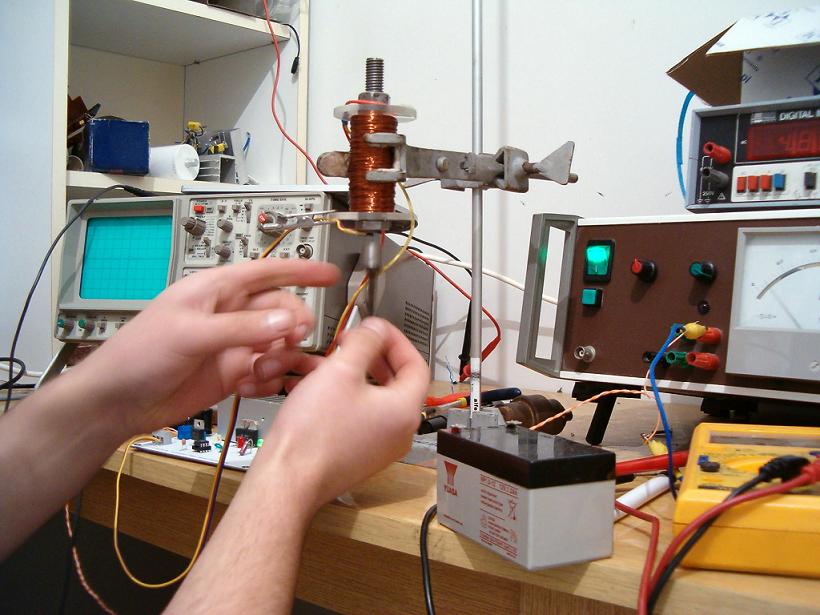
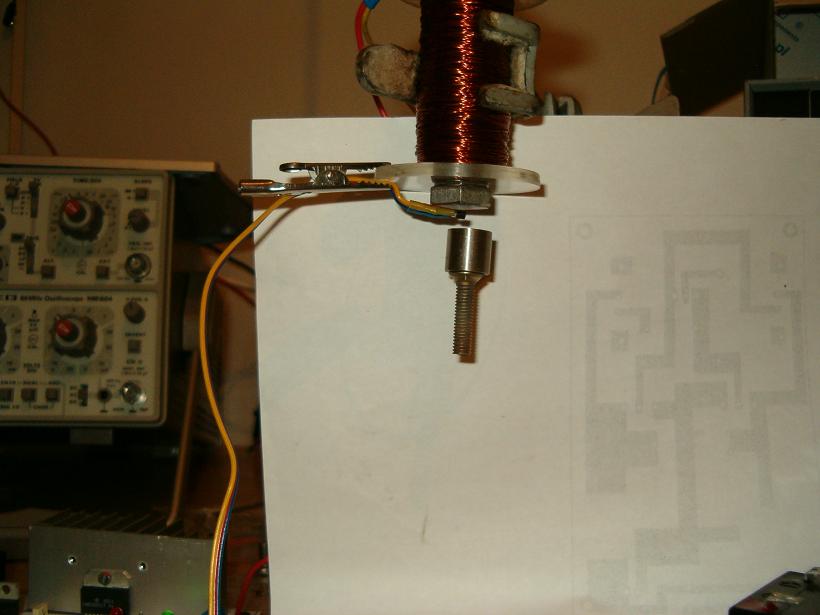
Układ działa, więc czas na podpięcie wykonanego wcześniej elektromagnesu. Zapinamy go w statywie i umieszczamy pod nim czujnik hallotronowy tak jak to widać na zdjęciu.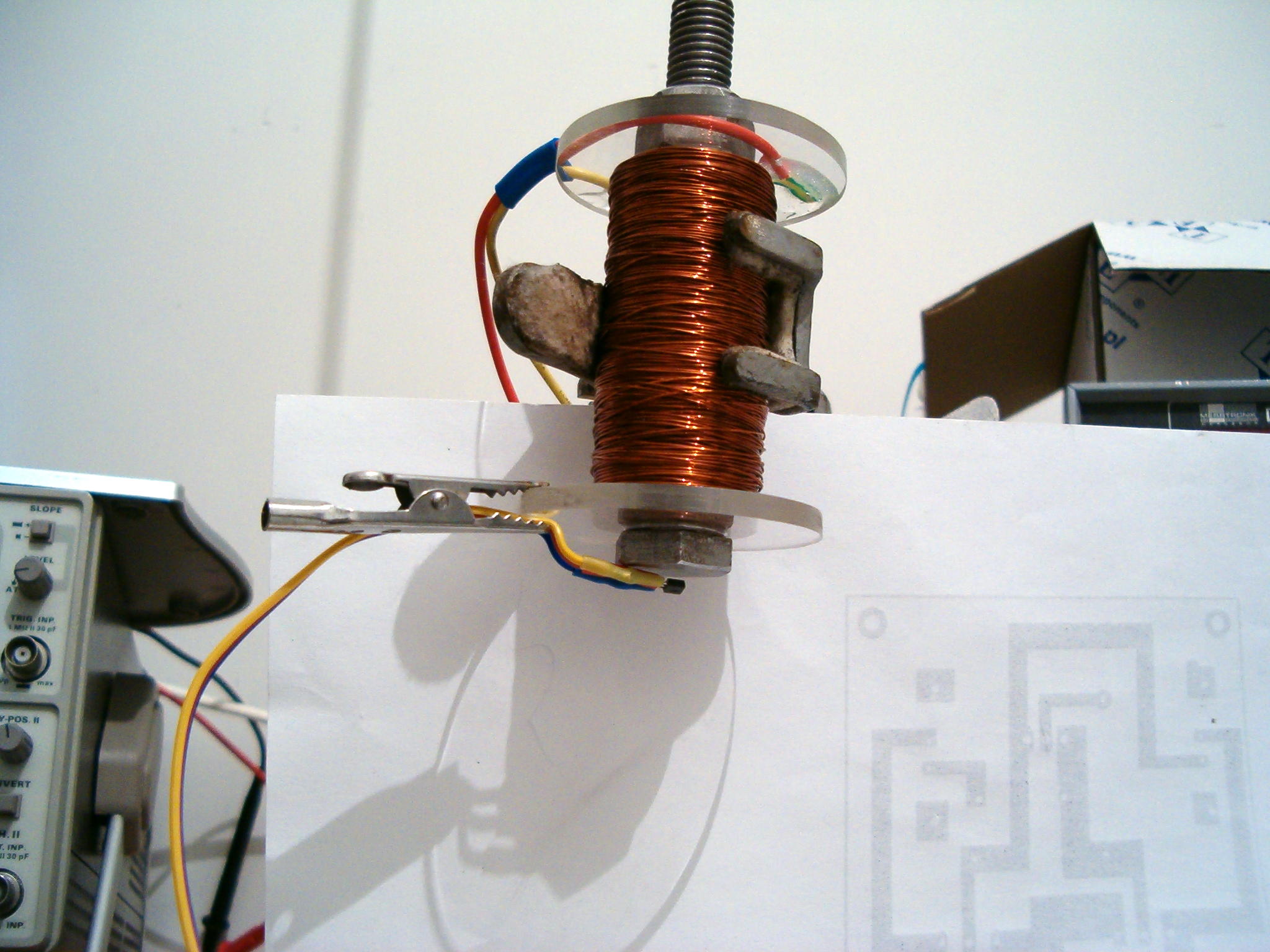 Teraz potrzebny będzie okrągły magnes stały, najlepiej gdyby był to magnes neodymowy. Jeśli magnes jest mały i lekki trzeba będzie doczepić do niego z jednej strony kawałek metalu dla poprawienia stabilności.
Teraz potrzebny będzie okrągły magnes stały, najlepiej gdyby był to magnes neodymowy. Jeśli magnes jest mały i lekki trzeba będzie doczepić do niego z jednej strony kawałek metalu dla poprawienia stabilności.
 Gdy magnes zaczniemy zbliżać do elektromagnesu odczujemy, że w pewnym momencie zaczyna drżeć i zostaje przyciągnięty ale tylko do pewnego momentu. Gdy spróbujemy popchnąć go dalej poczujemy odpychanie, jest to naprawdę niesamowite wrażenie. Teraz gdy wypuścimy magnes z ręki pozostanie on w powietrzu - będzie lewitował i jeśli tylko nie rozkołysaliśmy go za bardzo będzie tam wisiał dopóki nie wyłączymy zasilania. Lewitujący magnes można wprawić palcami w ruch obrotowy wokół pionowej osi i jeśli nie rozhuśta się za bardzo będzie obracał się bardzo długo, gdyż nie wytraci energii w wyniku tarcia, którego tu po prostu nie ma. Naprawdę warto wykonać taką zabaweczkę. Efekt jest pierwszorzędny !!!.
Gdy magnes zaczniemy zbliżać do elektromagnesu odczujemy, że w pewnym momencie zaczyna drżeć i zostaje przyciągnięty ale tylko do pewnego momentu. Gdy spróbujemy popchnąć go dalej poczujemy odpychanie, jest to naprawdę niesamowite wrażenie. Teraz gdy wypuścimy magnes z ręki pozostanie on w powietrzu - będzie lewitował i jeśli tylko nie rozkołysaliśmy go za bardzo będzie tam wisiał dopóki nie wyłączymy zasilania. Lewitujący magnes można wprawić palcami w ruch obrotowy wokół pionowej osi i jeśli nie rozhuśta się za bardzo będzie obracał się bardzo długo, gdyż nie wytraci energii w wyniku tarcia, którego tu po prostu nie ma. Naprawdę warto wykonać taką zabaweczkę. Efekt jest pierwszorzędny !!!.
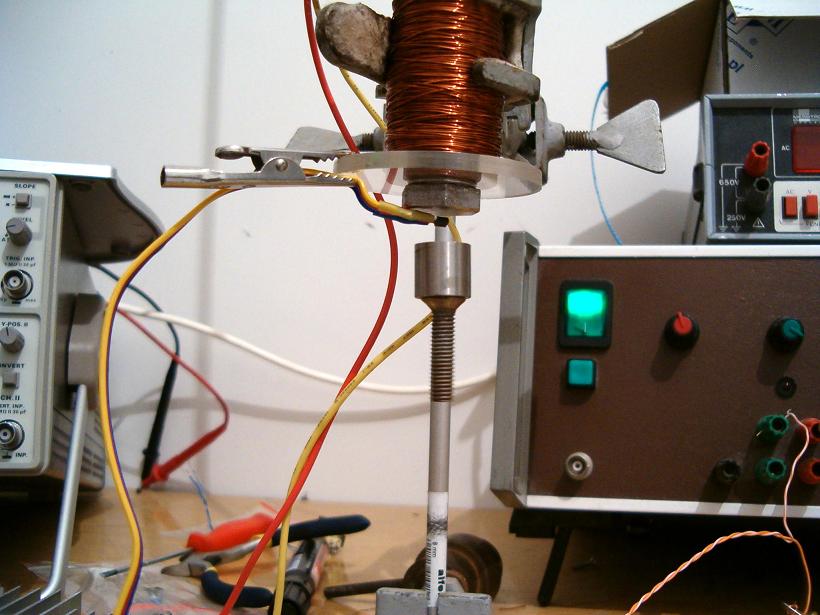
Poniżej jeszcze kilka fotek z przebiegu eksperymentu z lewitacją magnetyczną.
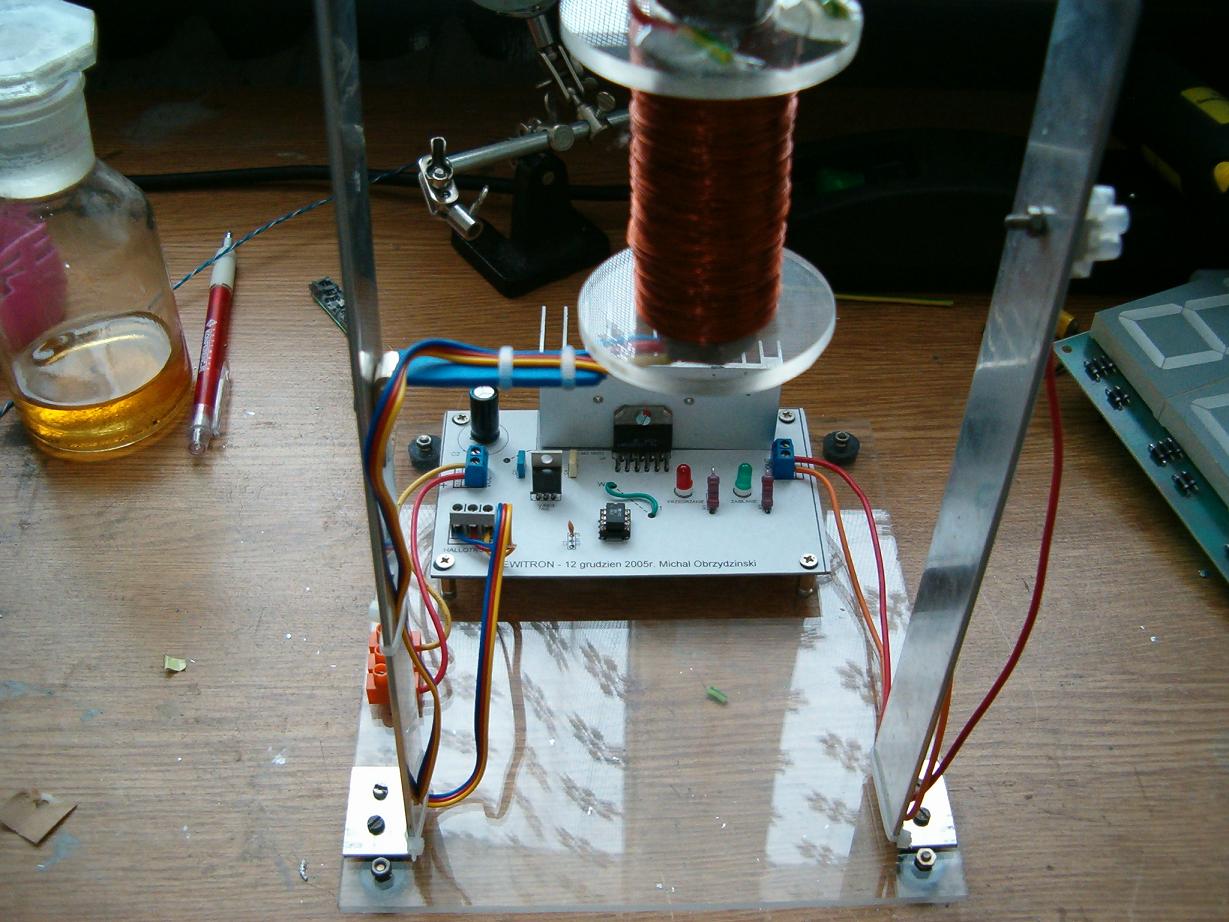
Gdy wszystko już działa, układ można zmontować w jedną całość. Ja standardowo przykręciłem wszystko do kawałka przezroczystej pleksy, wygląda to całkiem estetycznie. 
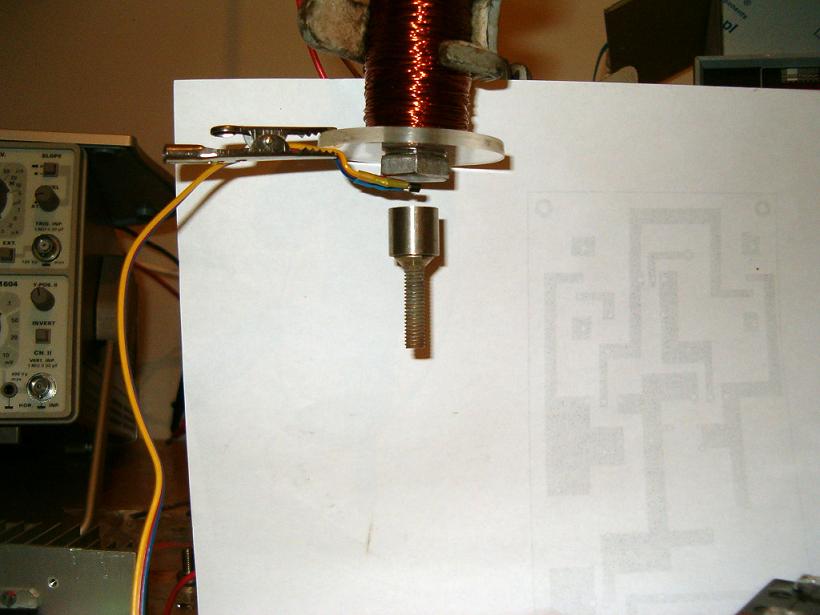
Testy robiłem na zwykłym magnesie i efekt był taki sobie. Gdy zastosowałem magnes neodymowy efekt był olśniewający. Magnes lewituje w odległości ponad 3 cm !!! 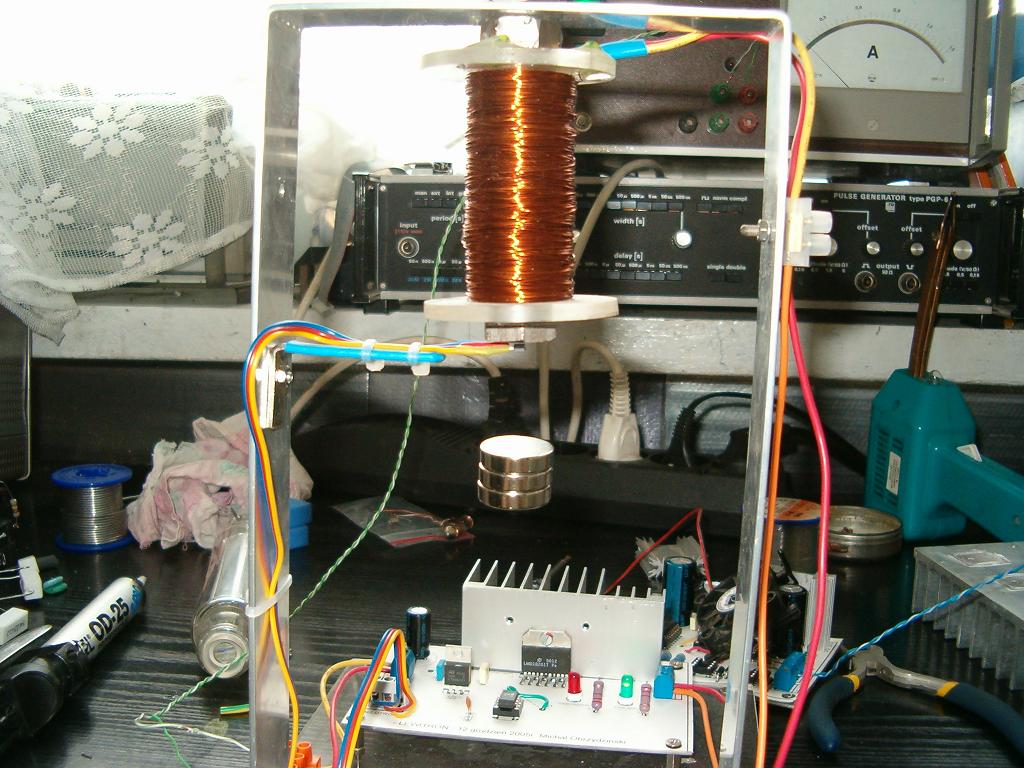
Fot. Lewitacja magnesu neodymowego.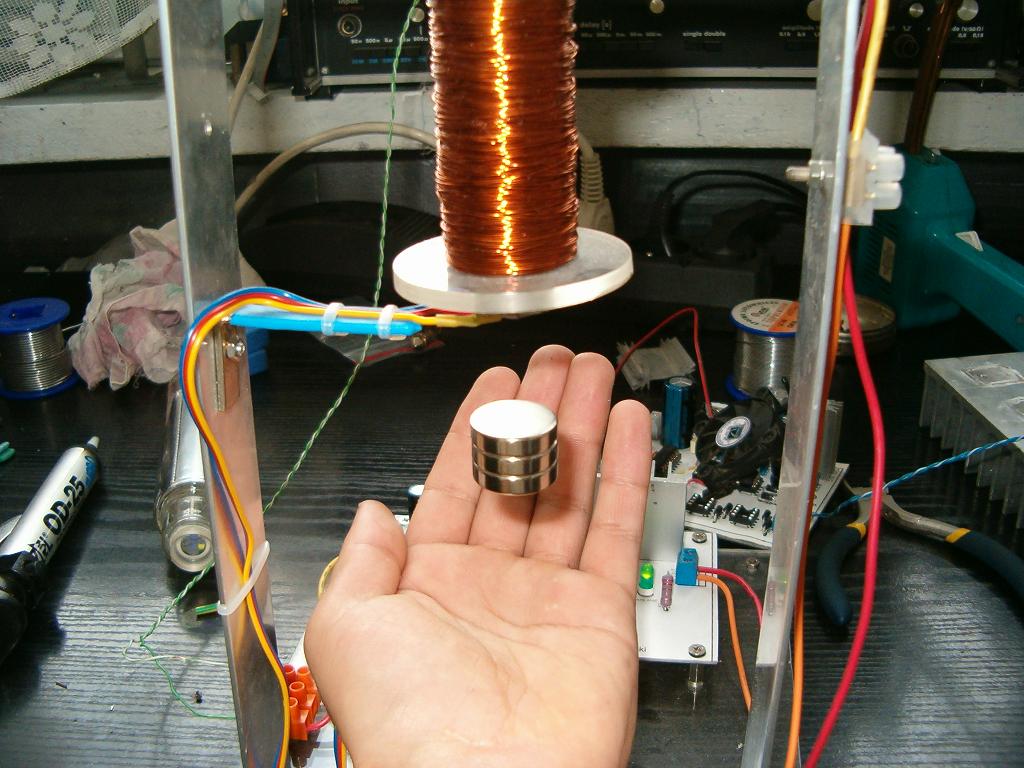
Fot. Odległość pomiędzy czujnikiem a magnesem wynosi ponad 3 cm.










