




Dawno, dawno temu ... :) zanim zacząłem jeszcze na poważnie zgłębiać tajniki elektroniki zdarzyło mi się kilkukrotnie zetknąć z silnikiem krokowym. Pierwszy raz było to jeszcze w podstawówce kiedy to rozebrałem gigantycznych rozmiarów (jak na dzisiejsze czasy) napęd dyskietek. Wtedy myślałem, że to zwykły silnik, hm ... tylko dlaczego wystawało z niego aż tyle przewodów ?
 Fot: Trzy silniki krokowe, które wymontowałem na złomie ze starej kserokopiarki.
Fot: Trzy silniki krokowe, które wymontowałem na złomie ze starej kserokopiarki.
Próbowałem oczywiście zasilać z baterii ten silnik podłączając napięcie w różnych kombinacjach do przewodów ale niestety silnik ani myślał wykonać choć pół obrotu. Dopiero jakiś czas później dowiedziałem się, że wszystkie wystające z silnika przewody są potrzebne do prawidłowej jego pracy.
Silniki krokowe to miłe i wdzięczne "stworzonka", które można sterować z wykorzystaniem bardzo prostych sposobów. Jedynie osoby, które chcą "wycisnąć" z tych silników absolutnie wszystko, co się tylko da, powinny wgłębić się w temat, poznać zaawansowane zagadnienia sterowania mikrokrokowego, złożone sterowniki i specyficzne sposoby sterowania. Tych sposobów jest oczywiście wiele, można wykorzystywać kombinacje układów analogowych, specjalistyczne dedykowane sterowniki lub mikrokontrolery a skoro projekt ten znajduje się w dziale o takim właśnie tytule dowiecie się jak sterować silnikiem z zastosowaniem mikrokontrolera i oczywiście do czego można taki silnik zastosować, ale o ciekawym zastosowaniu, o którym mówi tytuł będzie nieco dalej.

Zacznę oczywiście od samego początku czyli od budowy takiego silnika. Na cele pokazowe rozebrałem silnik, który porusza głowicą drukującą w drukarkach igłowych OKI (takie wielkie i strasznie brzęczące, które często słychać w urzędach). Silnik krokowy (impulsowy, skokowy) przekształca impulsy elektryczne na obrót mechaniczny wirnika. Jak widzimy na zdjęciu powyżej składa się on (podobnie jak silniki indukcyjne) ze statora, na który składa się wiele cewek oraz rotatora, który wykonany jest w postaci wielu magnesów trwałych.

Jeśli będziemy podawać sekwencję impulsów elektrycznych kolejno na cewki statora spowodujemy obrót rotora, którego prędkość będzie ściśle zależna od częstotliwości impulsów. Oczywiście jeśli zmienimy kolejność podawania impulsów na cewki zmienimy kierunek obracania się wirnika - to już kolejna, wspaniała zaleta tego typu silnika ale na szczęście nie ostatnia. Jeden impuls podany na którąś z cewek silnika powoduje jego obrót o zaledwie 0,72 do 3,6 stopnia - sprawia to wspaniałe możliwości napędu wszędzie tam gdzie potrzebny jest kontrolowany ruch. Wystarczy po prostu podać odpowiednią ilość impulsów by przesunąć wirnik o żądany kąt. Oczywiście silnik nie jest pozbawiony wad, jedną z nich jest mała prędkość obrotowa sięgająca w porywach kilkunastu obrotów na sekundę, jednak w urządzeniach typu drukarki, skanery, plotery, kserokopiarki duża prędkość nie jest wcale potrzebna. Wręcz przeciwnie potrzeba małych prędkości obrotowych i informacji o położeniu. Silnik krokowy spełnia te wymagania i ponadto przy tych małych prędkościach zachowuje swój pełny moment obrotowy.

Najpopularniejsze silniki mają cztery uzwojenia w statorze a właściwie dwie pary uzwojeń. I najczęściej dlatego mają różną liczbę wyprowadzeń bo te uzwojenia są różnie połączone.
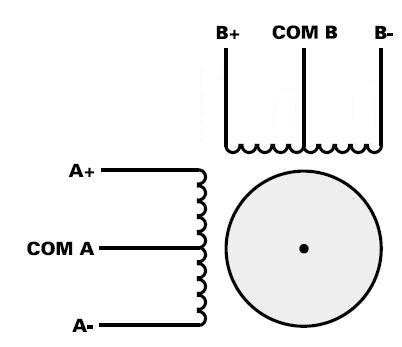 Ja w tym artykule zajmę się silnikami z sześcioma wyprowadzeniami bo takie występują najczęściej w starych drukarkach skanerach itp. czyli w miejscach skąd amatorzy tacy jak ja je pozyskują. Nowe silniki skokowe są naprawdę bardzo drogie, a te z demobilu możemy mieć za darmo i są w pełni sprawne nawet po wielu latach pracy.
Ja w tym artykule zajmę się silnikami z sześcioma wyprowadzeniami bo takie występują najczęściej w starych drukarkach skanerach itp. czyli w miejscach skąd amatorzy tacy jak ja je pozyskują. Nowe silniki skokowe są naprawdę bardzo drogie, a te z demobilu możemy mieć za darmo i są w pełni sprawne nawet po wielu latach pracy.
Niestety silniki pozyskane ze starej, śmietnikowej jak to ja nazywam, drukarki najczęściej nie mają nalepek z jakimkolwiek symbolem, a nawet jeśli już mają to nota katalogowa jest niedostępna. Jak w takim wypadku sprawdzić który kolor przewodu odpowiada któremu uzwojeniu ?. Nieocenioną rolę odegra tu omomierz, którym sprawdzamy rezystancję pomiędzy wszystkimi przewodami i notujemy je na kartce. Na początku rozdzielany przewody na dwie wiązki, które nie mają elektrycznego połączenia (omomierz nie reaguje), tym sposobem oddzieliliśmy dwie cewki. Następnie badamy każdą wiązkę z osobna, znajdujemy parę o największej rezystancji, będą to na pewno przewody A+, A- lub dla drugiej B+ i B-. Ostatni przewód, który został nam w wiązce, a który ma rezystancję o wartości połowy tego co ma A+ i A- względem właśnie A+ i A- jest przewodem COM A lub dla drugiej COM B. Jedyne czego nie sprawdzimy od razu to kolejność cewek w parze, ale nie jest to problemem, bo po podłączeniu do generatora impulsów (o którym za chwilę), jeśli silnik nie pracuje poprawnie, wystarczy zamieniać kolejność A+ z A- i B+ z B- do czasu osiągnięcia efektu.
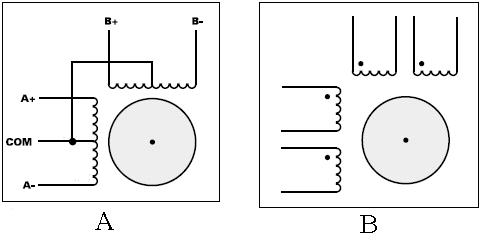
Rozbierając stare urządzenia napotykałem też często silniki o pięciu wyprowadzeniach. Ich budowa jest identyczna z tą różnicą, że połączone są wyjścia COM cewek wg. rysunku A powyżej. Bardzo rzadko trafiają się silniki z rozdzielonymi wszystkimi cewkami (rysunek B), układ taki pozwala na bardzo zmyślne sposoby sterowania ale o tym będzie w innym projekcie. Zapraszam do przejścia na następną stronę przyciskiem poniżej, wyjaśnię jak taki silnik zmusić do pracy.










